

Komaroff
-
Публикаций
11 -
Зарегистрирован
-
Посещение
Сообщения, опубликованные Komaroff
-
-
Упс. Вставились лишние фотки после спойлера

Плиз, удалите фотки и вложение после спойлера. Только ненароком не заденьте фотки под спойлером и из первого поста темы
")
-
Что-то подзабросил я тему.
А проект же не остановился ! Сделан рестайлинг, новые форм-факторы.
Некоторые подробности.
В разработке с самого начала предусмотрена возможность калибровки сенсоров.
Это одно из главных достоинств, так как позволяет учесть и нивелировать технологические разбросы основных параметров элементов для каждого экземпляра сенсора. Я предпочел внимательнее присмотреться к "фундаментальным" параметрам, чтобы получить наиболее высокие показатели итоговой линейности и разрядности сенсора.
Простая проверка и выбраковка по этим характеристикам - не выход, т.к. пришлось бы сильно увеличивать их допустимые отклонения, а следовательно получить худшие характеристики по сравнению с нынешними.
На калибровочном стенде имеется возможность контролировать и учитывать основные параметры элементов. В первую очередь, конечно, это многим известный магниторезистор KMZ41 (применяется, например, в серийных джоях Defender Cobra M5 и любительских схемах магрезов). Хотя KMZ41 это не последний элемент, который требует коррекции параметров.
В общей сложности калибруется и контролируется свыше десятка параметров.Ну и еще момент про старый холивар (тянется еще со времен "Сухого") - какие чипы KMZ41 лучше, производства Филипс или NXP ?
Большей частью я ставил NXP. Только из-за того, что Филипс продал профильное подразделение и на его базе был создан NXP. Сейчас KMZ41 делается под маркой NXP.
Попадался и Филипс. Присылали знакомые специально для теста, да и потом несколько раз попадались. Особо запомнилось как в один прекрасный день в нашем радиомагазине сказали, что NXP закончились, в наличии есть только Филипс. Делать нечего, Филипс так Филипс... Кто говорил, что он глючный ? Кстати, показали хорошие результаты.
В общем я не обнаружил у KMZ41 производства Филипса (ряда разных дат изготовления) отклонений от спецификации.
А вот NXP недавно огорчил. Попалась линейка NXP, которая неожиданно и неприятно разочаровала наличием нескольких (не всех подряд) некондиционных экземпляров чипов. Самое удивительное, что претензии были к чувствительности магниторезистора. Этот параметр напрямую влияет на требуемое количество отсчетов (реальные разрядность и разрешающую способность - real resolution). Хотя по характеристике линейности сенсоры с ними показали нормальные результаты. В общем по итогу пяток микросхем пришлось перепаивать, а некондиционные отправились в утиль.
В настоящее время я не особо задумываюсь о выборе между Филипсом и NXP, особенно если для NXP приходится делать на пару телодвижений больше. Калибратор обоих уравняет !
Актуальность калибровки подтверждает такой факт. Подставил в математическую модель неоткалиброванные максимально допустимые по спецификации отклонения параметров KMZ41. При этих значениях нелинейность (отклонение от идеальной характеристики) составила 10 с хвостиком угловых градусов в плюс и минус (суммарно 20 градусов !!). Сакральная цифра. Благо, что даже с такой печалью калибратор справляется на раз.Индивидуальный подход к каждому экземпляру позволяет получить на выходе эксклюзивные характеристики девайса.
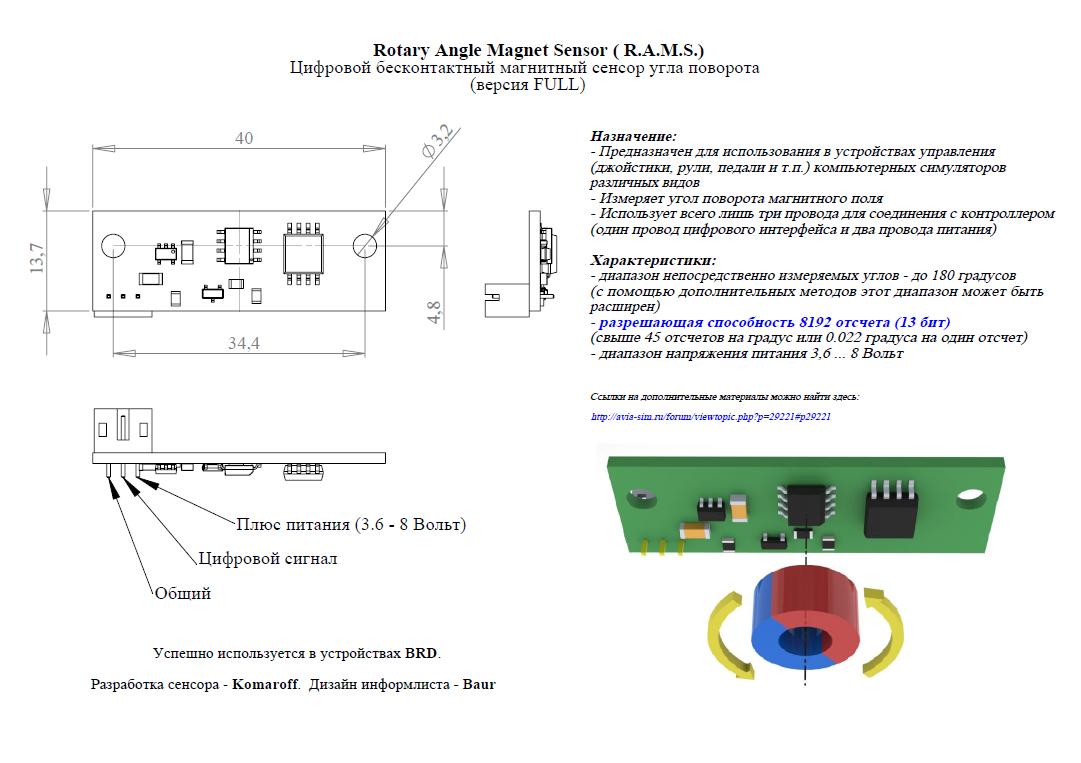
Более подробно Цифровой магнитный сенсор
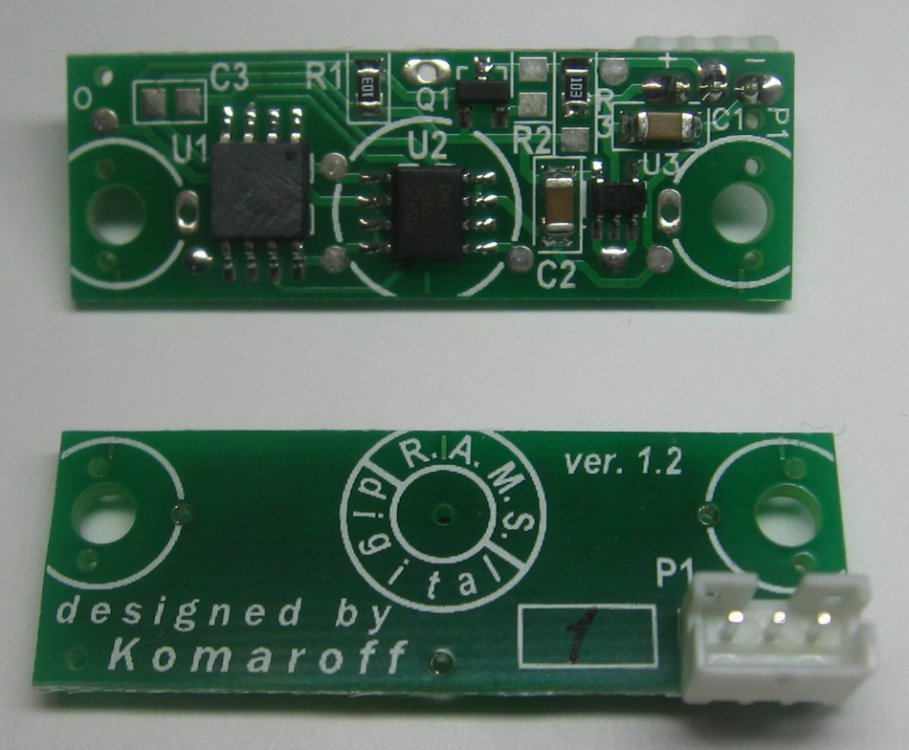
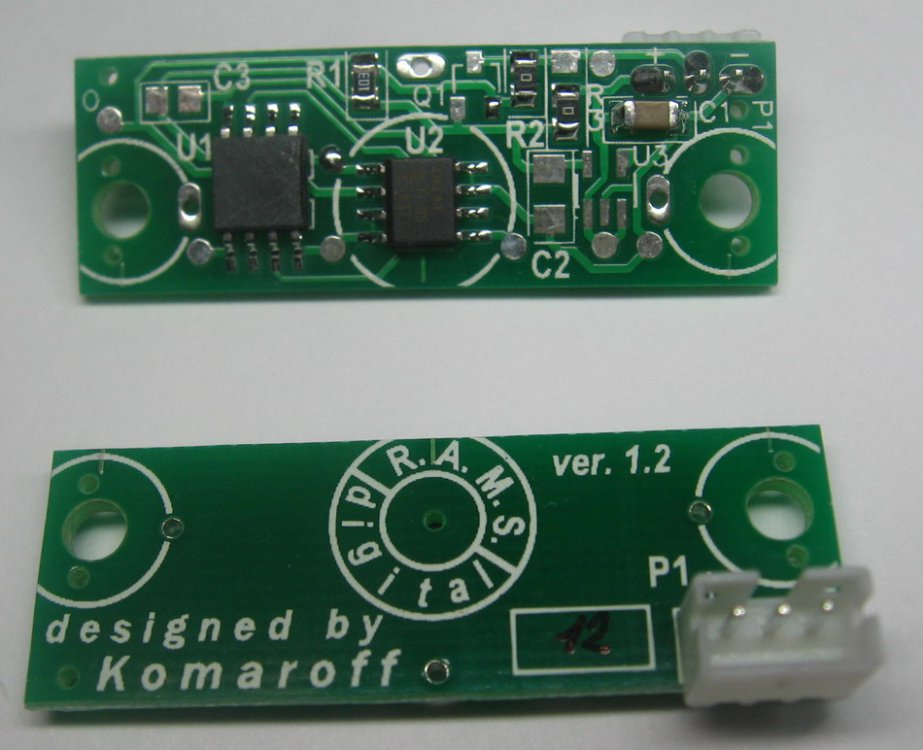
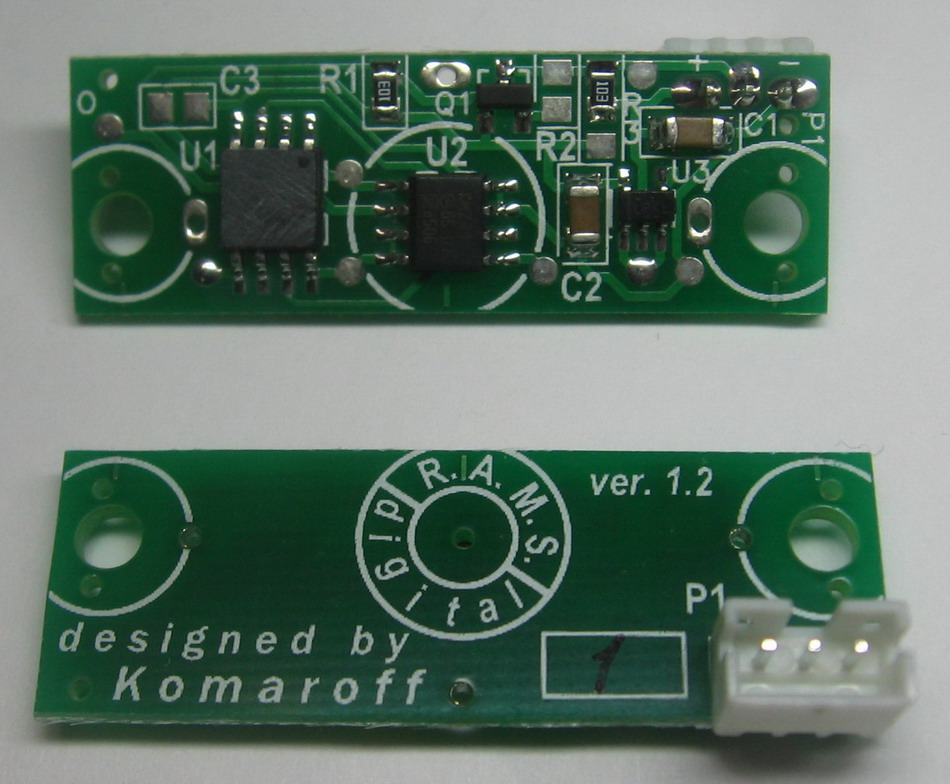
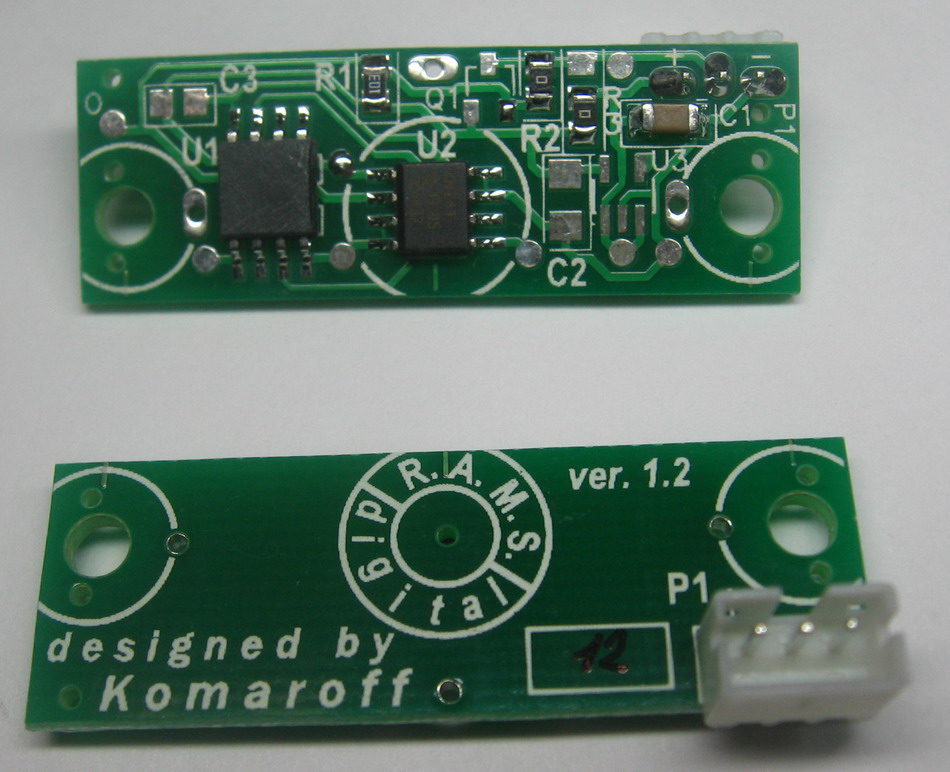
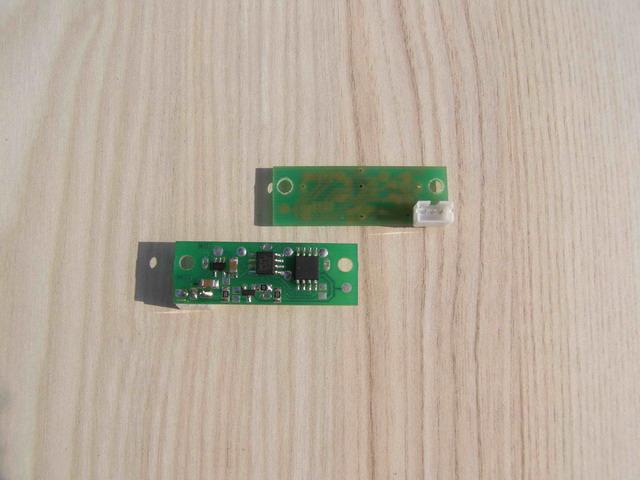
Фото "рестайлинга" и информлисток от Baura



-
Аналогично. Очевидно у какого-то подленького многократно сбитого лишенца планка упала. И он решил мелко нагадить.
Есть ли возможность исправить такую нездоровую ситуацию ?
-
 1
1
-
-
Слава. Мои поздравления !
Пусть твой талантище светит, разгораясь с новой силой, освещая нас грешных и разгоняя все невзгоды на твоем пути !
Удачи !
-
Поздравляю с очередной Годовщиной.
Так держать !

-
=CC=Azef. Лучше обратиться к разработчикам. Черкни вопрос на форуме БЗС в ветке про выбор РУД и РУС (http://forum.il2sturmovik.ru/topic/949-vybor-rusa-i-ruda) . Думаю разработчик сам увидит и ответит довольно быстро. Лучше было бы на Сухом, но он сейчас пока лежит.
n4eJIkuH. В этом РУДе на основной оси не резистор, а бесконтактный магнитный датчик.
Согласно описанию проблемы, вероятно замыкание проводов или контактов накоротко при движении ручки и, как следствие, отключение контроллера. При движении назад, соответственно, восстановление цепей и перезапуск контроллера РУД.
-
1
-
-
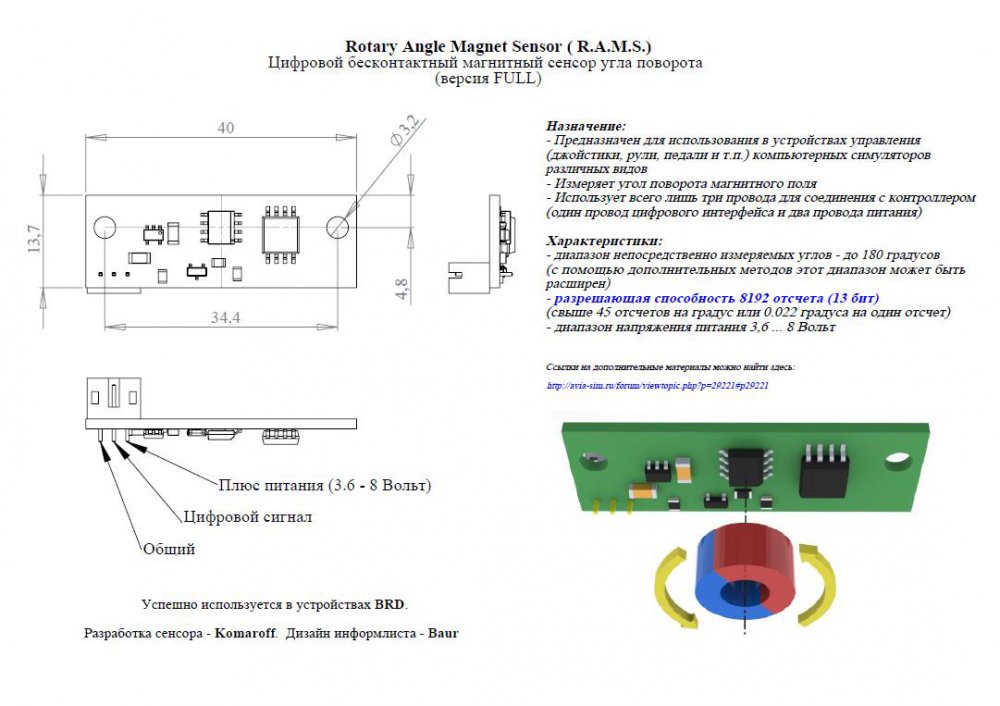
Рабочее название датчика R.A.M.S. (чтоб разведка супостата не догадалась
).Эта, несколько забавная из-за созвучия с терминологией известного сленга, аббревиатура означает
Rotary Angle Magnet Sensor (Магнитный датчик угла поворота).
К слову, рамс – карточная игра.
Так что никто «рамсы» не попутал и, кстати, «понты» не кидает
.Хотите предложить более подходящее название ? Предлагайте, форвертс !
-
Историческая справка.
В свое время, я занялся поиском простого способа линеаризации магниторезисторных мостов. С помощью обратных связей окончательно решить эту задачу не удалось. Тогда обратил внимание на цифровые способы обработки сигналов. Ранее был проaнaлизирован широкий спектр элементной базы, имеющейся в пределах доступности и приемлемой по цене. Естественно, не остались без внимания и типовые решения, предлагаемые производителями. На данный момент много доступных по цене датчиков сняты с производства. Ряд из имеющихся неприемлемы по цене.
Как ни странно, наиболее оптимальным оказалось сделать сборку из нескольких элементов, каждый из которых выполняет свою отдельную функцию, с выдачей результата в цифровом виде.
Был сделан ряд прототипов. В процессе работы появился вопрос о выборе форм-фактора датчика. Для решения этого вопроса я обратился к разработчикам механики. По их исходным данным и выбирались форм-факторы. В том числе и итоговый вариант, для которого, с целью качества и технологичности изготовления, было решено не экономить на печатных платах, и изготовить их на заказ.
Так как датчик выдает результат в цифровом виде, то нужна поддержка со стороны контроллера устройства. При работе я использовал стендовый контроллер с ограниченным функционалом, которого, естественно, недостаточно для полноценного контроллера устройства управления. Поэтому, для ускорения комплексной разработки, я предложил ряду известных в наших кругах энтузиастов встроить поддержку датчика в разрабатываемые ими контроллеры. Плюс, мы получили коллектив весьма компетентных и уважаемых тестеров датчика.
Ближе к анонсу датчика пришлось прислушаться к рациональному звену в доводах представителей известной команды разработчиков, имеющей на вооружении близкие по параметрам устройства, относительно выкладывания исходников проекта. Поэтому, к сожалению, было решено исключить из моих планов раскрытие подробностей технологии и выкладывание исходников проекта. Кроме того было бы логичным сначала ознакомиться с подробностями технологии от первопроходцев.
Естественно, для истории надо упомянуть участников проекта, которые помогали организационно, программной и аппаратной поддержкой, тестированием и просто дружеской поддержкой. Это
Baur,
Kimarius (159BAG_Kimarius),
Slaw,
и еще ряд людей, пожелавших остаться в тени.
Отдельно, конечно же, не забуду упомянуть первопроходцев, команду ВКБ.
-
На правах введения.
Как известно, датчики для устройств управления играют значительную роль в показателях точности и надежности. Большинство из нас по опыту знают, как быстро выходят из строя штатные резисторы с вытекающими последствиями, которые можно сравнить с удовольствием родео в воздухе (или на трассе…). Причем основные впечатления получаешь, когда сидишь на шести у супостата и, вдруг, твой крафт совершает резкий головоломный скачок в сторону прямо в момент нажатия на гашетку (или в момент обгона …
).Надежность обеспечивает бесконтактный способ снятия сигнала с чувствительного элемента. Например, оптический способ, или с помощью магнита. Всякие там сельсины и СКВТ я не рассматриваю. Наиболее удобным я считаю магнитный способ. Основные виды магнитных чувствительных элементов - это магниторезисторы и датчики Холла.
Но надежность и долговечность это еще не все. Широко известны «красивые» ромбы, рисуемые штатными холлами некоторых стиков в тестовых программах. Это следствие нелинейной зависимости выходного сигнала датчиков от угла поворота оси. Магниторезисторы, в чистом виде, тоже не лишены нелинейности, и даже нелинейны в большем размере. Т.е., кроме надежности, важна еще и линейность отклика датчика на отклонение осей. Хотя и существуют линейные решения на датчиках Холла, тем не менее, наиболее удобным из магнитных датчиков по ряду параметров является магниторезисторный мост. Поэтому я сделал выбор в пользу магниторезисторов.
-
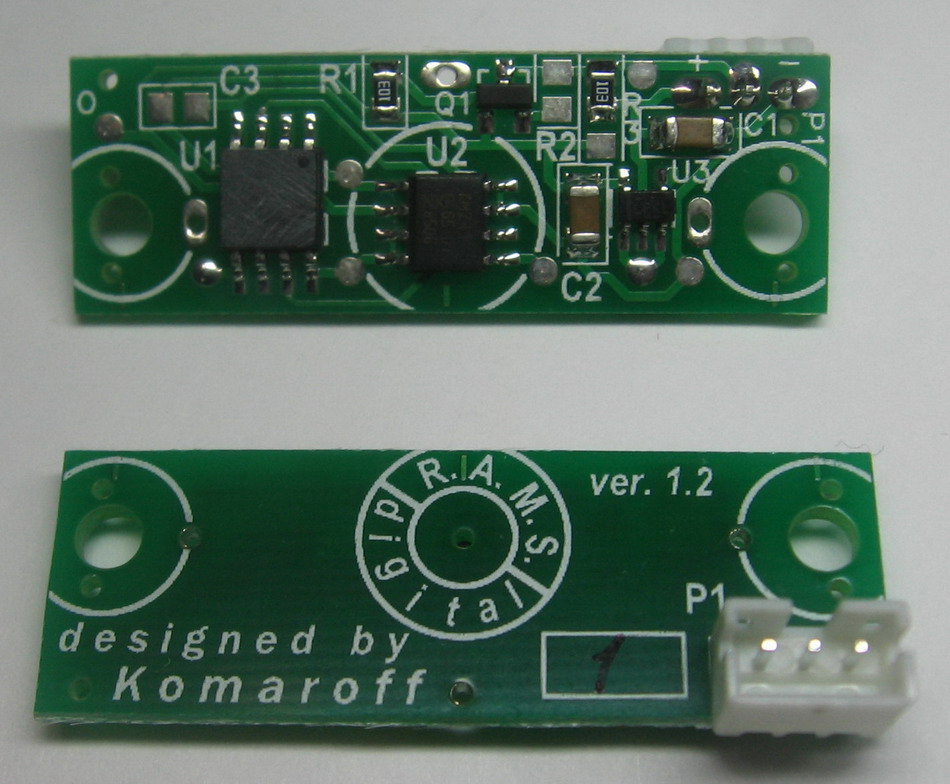
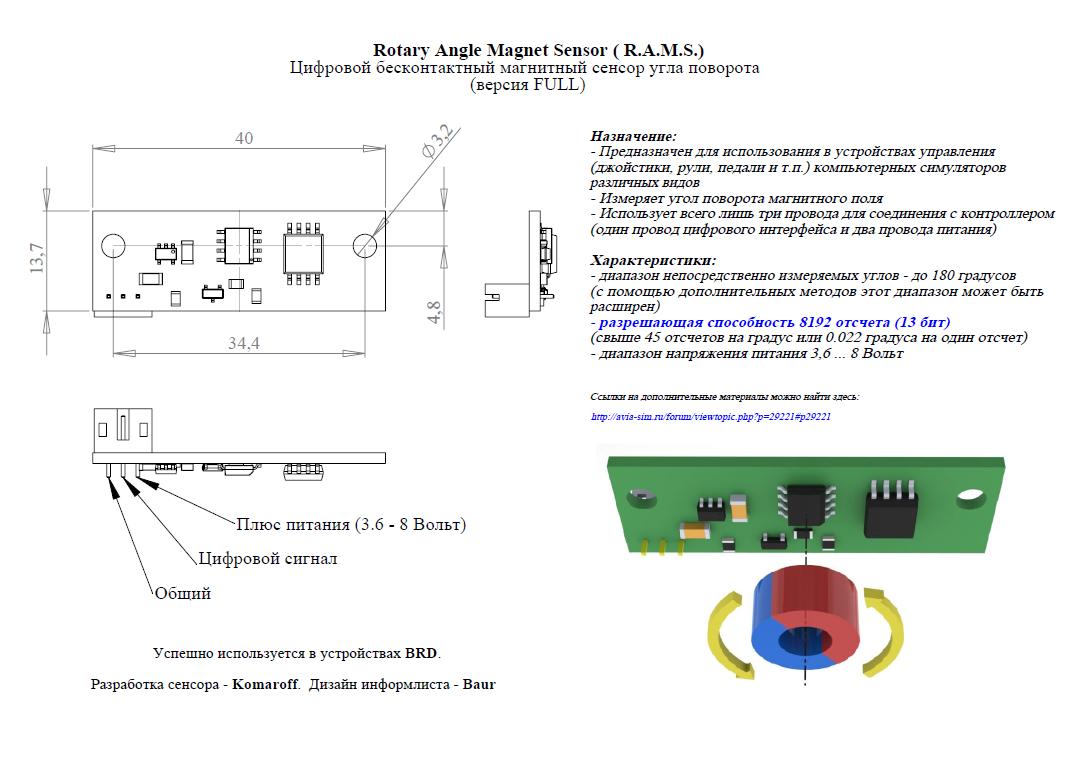
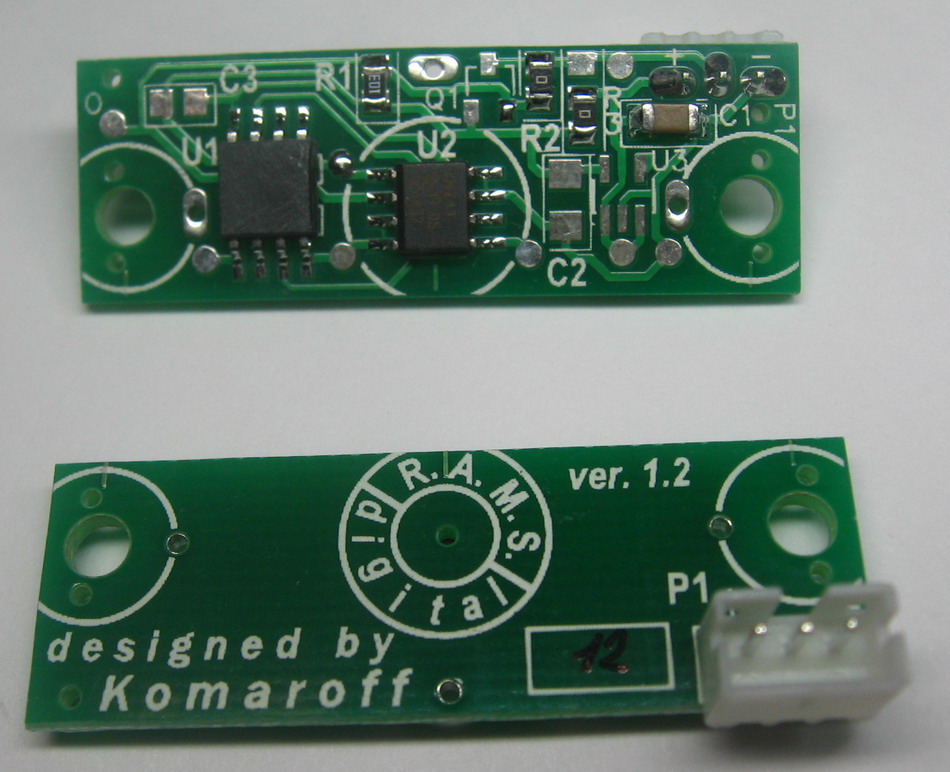
Разработан цифровой магнитный датчик угла поворота. Датчик может быть с успехом применен в устройствах управления для компьютерных симуляторов различных видов.
Параметры датчика:
– разрешающая способность 8192 отсчета (13 бит)
– диапазон измеряемых углов - до 180 градусов (ведется работа по расширению диапазона измеряемых углов)
- сигнал передается в контроллер устройства управления по одному проводу.
Иными словами это примерно 0,022 градуса на один отсчет.
Таким образом, например, для джойстика можно получить свыше 1300 отсчетов на 30 градусов угла отклонения ручки. Для сравнения, это такая же разрешающая способность, как у известного датчика KMA200 (применялся, например, с контроллером от Kreml. И по этому параметру, на момент анонса, превосходит заявленные данные ближайшего функционального aнaлога.
Кроме повышенной точности, в числе достоинств цифрового датчика – его высокая линейность и стабильность. При установке в устройство датчик не требует механической ручной подстройки, и не исключает использование задействованных выводов контроллера в aнaлоговом режиме.
Контроллеры с поддержкой рассматриваемого цифрового датчика:
– BRD (применяется в разработках Baur Мастерская -=NT=-, 3D-модель - его);
– =SPb=RED BARON (Его работа на "Расправленных крыльях", Тут про одно из первых применений его контроллеров с поддержкой цифрового датчика в педалях Slaw , И на Алексе ) ;
– Kreml (пока посредством внешней платы, но есть перспектива прямой поддержки !!).
И я думаю этот список будет расширяться.
В планах – разработка вспомогательных плат для подключения датчика к серийным контроллерам взамен родных резисторов и, конечно, создание собственного контроллера с поддержкой цифровых датчиков и широким функционалом.
Тема на Сухом
http://www.sukhoi.ru/forum/showthread.php?t=80617
Печатные платы одного из вариантов датчика (на снимке) изготовлены на заказ и учитывают особенности разных контроллеров. В итоге датчик не уступает изготавливаемым промышленно и является достойной альтернативой существующим решениям.
Датчик имеет нереализованный потенциал для повышения разрешающей способности. Но, во первых, имеющихся возможностей более, чем достаточно для абсолютного большинства задач управления. Во вторых, повышение разрешения происходило бы за счет других характеристик, например помехоустойчивости.


Teamspeak 3
в Игровой сервер AleXserver
Опубликовано
Обновил клиент Тимспика
теперь пишет при попытке зайти на сервер Алекса :
" Отключен от сервера (server version is too old for command) "