

Alex Oz
-
Публикаций
97 -
Зарегистрирован
-
Посещение
Сообщения, опубликованные Alex Oz
-
-
Можно вместо них

То есть больше сопротивление - меньше компенсация, соответственно больше MЗ
А колбасит ручку правильно - для того MЗ и вводилась, либо надо было делать
очень вялый отклик в контроллере
-
Ежели ручка не сыщется, на крайняк можно из JSK-420 переделать
-
щёлочь нужна для проявления фоторезиста - для POSITIV20 (аэрозоль) - NaOH, для сухого плёночного негатива - Na2CO3
Травление платы - обычным методом
-
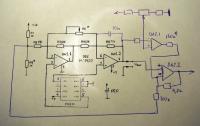
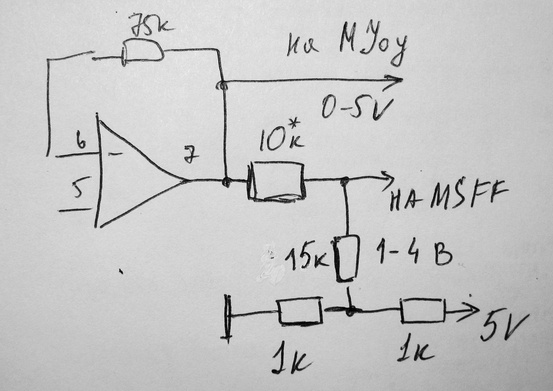
Схемка приблизительно так - с небольшим изменением - резистор 100 к повесил к виртуальной земле - возможно
при этом можно будет удалить цепь балансировки нуля компаратора DA2.1, подвесив её туда же.
Да, посмотрел недавно человек выкладывал фотки авиатора - там LM339 просматриваются 2 шт, похоже на второй задействован только один канал(ага, в авиаторе пять осей, одного чипа не хватило на все
fred kaa)Скорей всего на компараторы подают общую пилу, получают время импульса на выходе (по сути тот же геймпорт, только малость поточней ) -
в таком случае контроллер можно использовать подешевле без АЦП, хотя мне кажется разницу сожрёт дополнительная обвеска и площадь платы.
-
Да, две схемы, но можно на одной плате, хоть на двух сдвоенных операционниках, хоть на одном счетверённом (MCP 604)
c 1446 операционниками не общался, поэтому лучше спросить в гугле-яндексе
-
Насколько видно из схемы п. #2, никакой экспоненциальной нелинейности схема не имеет, характеристики не изгибает, а только смещает линейно - создаётся скачок напряжения D1 ( в качестве компаратора) при переходе через ноль (регулируется R 220 Om), который компенсирует скачок MЗ. Величина компенсации настраивается резистором 130 кОм.
С дифферециальной схемой подружить напрямую боюсь будет сложно - малы входные напряжения с KMZ, даже если использовать компаратор.Хотя попробовать можно,
но лучше их соединить соединить цепочкой.
Вообще интересно, есть у кого схема входных цепей EVO или подобных, там где есть микруха с обозначение 393 (компаратор)?
такое подозрение что оно там для тогож самого, только непонятно почему в контроллере нельзя этого было сделать????
-
Реально наверно только осциллографом..
Либо специальным джойтестером с калиброванной и масштабируемой осью времени..но таких ещё нет
Да и что-то мне кажется частота будет очень низкой, <25 гц, а это достаточно сложная задача будет на дискретах сделать,
чтоб и джой не тупил, и вибрацию погасить
Честно говоря для меня эти форсфидбечные дела пока что-то из области магии, поскольку ни одного такого девайса осциллографом не щупал
-
Вобчем подключил датчики к FF2, и сделал отвод для сигнальных проводов и подключил сигнальные на Мджой. появилась "дрожь" - видимо это с контраллёра FF2, я побоялся на Мджой вести плюс с минусом от FF так как на нём напуга отличается от USB-шной. Назначил в иле оси на Мджой, вылетел - обратка работает Видимо Илу пофиг откуда идёт сигнал на него, и FF - пофиг
 Дальше отключил Мджой и назначил оси в иле на СН, вылетел, управлял СН а FF отрабатывал рядышком обратку
Дальше отключил Мджой и назначил оси в иле на СН, вылетел, управлял СН а FF отрабатывал рядышком обратку 
Алекс, в твоей доработке схемы под FF и Мджой можно ли добавить фильтр чтоб дрожь идущую с FF отсечь?
Попробовать можно, хотя бы тем же самым кондёром, просто увеличивая его... Но такой способ не очень хорош, джой может стать тормозным поболее кугара
Да и колебания сами могут увеличиться - фиг его знает как там обратка с контроллера съест это дело
Оценить бы частоту колебаний палки, да тогда уже LC фильтры считать
-
Да не, там намного меньше будет, у меня мышка из конца в конец монитора двигается за 3см по столу, я думаю этого достаточно для точного джоя. А размеры я не указывал, это просто изображение идеи, даже без соблюдения каких-либо пропорций... Ну это не суть важно, я все равно это сделать не смогу, а другие не захотят, так что это так, "размышления на тему"...
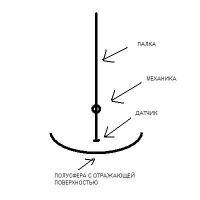
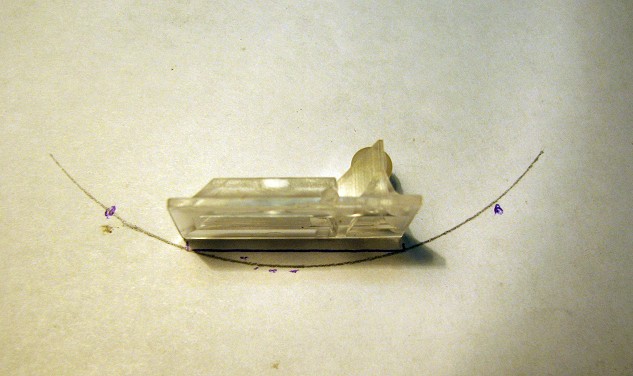
Тут дело вот в чём(см фото). Нарисованная линия - плоскость фокуса .Видно что до поверхности ещё далеко, а это уже радиус 50 мм
....хотя наверно есть и покомпактней оптика

-
Т.е. у тебя датчик ПОД этой контрукцией был? Просто я предлагал такой вариант (сорри за кривые руки, но наверно поймешь):
В принципе реализуемо, только потребуются бОльшие размеры , из-за того что оптическая система не такая уж маленькая, а расстояние до поверхности (точно не помню) где-то 0.5-0.8 мм должно быть
Навскидку от центра вращения до поверхности никак не меньше 50-60 mm.
Да и не думаю что это принципиально что-то поменяет, поскольку подключение было напрямую, так что всякие виндовые заморочки не мешали никак.
-
вы плавно возвращаетесь в 1995 год это уже было, звалось MS Preticion Pro или FF Pro. FF Pro считаю лучшим из серии MS. еслиб ещё как то можно было бы отключить твист и газ, в контраллёре, оставив только оси Х и У, былоб вообще - супер так как от твиста и газа рывки паразитные идут.
принцип разный - дифференциальный оптоприёмник аналоговый и cmos-камера у мыши, способная теоретически дать 1000 и более честных отсчётов (для 1600 dpi)
А если в одну сторону двигать быстро, а обратно медленно? У меня вот не возвращается в ту же точку.Всё верно, у меня так же было. А если к тому ж двигать не по прямым, а по всяким траекториям с разной скоростью..то вообще центровать надо реально было каждые 10-15 сек.
-
Года два назад я такую штуку пробовал - конструкцию понятно по фотке, это то что сохранилось, жаль выбрасывать, дорога как память
Точилась на ЧПУ, так что вряд-ли дело в неидеальности сферы.
Сверху как загрузка использовался пыльник, снизу - полусферическое ложе, в нём отверстие, снизу датчик. Датчики пробовал от мышей A4Tech - X7 cерии (1600 dpi) и серии G с инфракрасным лазером, которые типа на стекле работают. Данные напрямую считывал с сенсора по SPI, пробразовывал в аналог и подавал на вход джоя.
Результат в обоих случаях - отрицательный. То есть в принципе работало, но... вообщем закинул я это дело

-
Подключил сейчас в оффисе, дрожь ещё сильнее
 хотя напряжение 4,98v Уже и не знаю на что думать. Всё проверял сто раз. дрожат сабаки и всё тут
хотя напряжение 4,98v Уже и не знаю на что думать. Всё проверял сто раз. дрожат сабаки и всё тут на 6-7 MCP кондёр вешал?
-
А для этих датчиков (на MCP601 и MCP602) длинна проводов и то провода не экранированны на дрожь может влиять?
Очень и очень маловероятно
-
Его поставить на сразу на вход всего.
такие стабилизаторы любят керамический конденсатор большой ёмкости на выходе - 2,2 uF, не лишним и на входе его будет такой же
http://www.alldatasheet.com/datasheet-pdf/...NSC/LP2981.html
-
Да у меня 2 вольтметра, стрелочный (старый ещё из СССР) и цифровой. Напряжение они одинаково показывают. У меня почти всегда выше 5v. От5,2 до 5,5-5,7. Может правда мощности б/п нехватает вот он и глючит?
Не, мощность как таковая БП тут как таковая не причём, скорей трабла в мамке, стоит попробовать отдельный БП для проверки
Хотя при таком напряжении уже можно использовать доп стабилизатор 5V low-drop, типа LP2981-5.0
-
Осциллографа к сожалению нет, а резюк на 75к уменя там и стоит. Конденсатор стоит на 10, как и в схеме.
Где смотреть питание? У меня с USB идёт 5,0 – 5,5v.
10 uF - это доп фильтр на питание 5V, попробуй 0,01-0,1 uF на 6-7 дополнительно повесить
Смотреть прямо на плате... 5,5 V c USB - либо вольтметр врёт, либо USB кривое
Обычно пару десяток нехватает, но чтоб полвольта в плюсе....
-
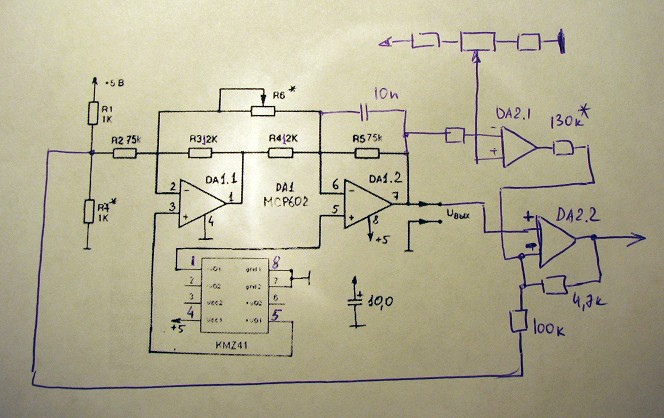
Прежде чем обьеденять Mjoy и MS, решил собрать и подключить обычную схему KMZ41+MCP602, благо платки уже протравил. Как и советовал Alex_Oz заменил резюки. Всё заработало, полный диапазон, но у датчика дрожпричём на разных датчиках - разная, на одноом датчике больше, на другом меньше (в DXTweak2 по оси Х 3-4 значения, по оси У 1-2) Проверял на двух Mjoy8 и на двух Mjoy16.
И ещё ось Y у меня инвертированна. Как сделать её нормальной? крутил магнит разными сторанами, менял магниты, толку ноль.
И посмотрите правильно ли переделал платку, по той схеме что дорисовал Alex_Oz, я начинающий в рисовании плат, мог что то и попутать.
С шумом надо выяснить не возбуждается ли на вч операционник - лучше осциллографом, либо повесить ||75к (ноги 6-7 МCP) кондёр как по первой схеме
Если шум останется - смотреть питание либо ставить магнит посильнее, возможно KMZ на в насыщении работает
Нопонятно почему магнитом нельзя инвертировать ось, менять разводку на плате - больше проблем -
то есть либо поменить полярность питания моста, либо подключать наоборот выходы (ноги 3-5 MCP)
-
Придётся повозится с настройками под каждую ось
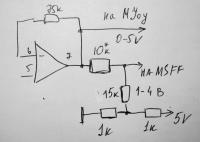
Сначала нужно получить полный размах 0-5V для MJoy ( на самом деле рекомендую 0,1 - 4,9) - операционники хоть и дотягивают до краёв, но на последних десятках дают нелинейность
Затем нужно получить в средней точки делителя 1к*-1к* напряжение такое же как и с резисторов M$ в центре
Ну и в конце резистором 10к* согласовать края( по возможности, идеально вряд-ли получится)
Отклики M$ и Mjoy не должны после этого сильно отличаться
-
Вторая схема моя - "Узнаю брата Колю" !
Стыкануть с M$ попробуй по такой схемке
-
Тут появилась ещё одна непонятка, может кто разъяснит - поможет.
В двух словах для чего это нужно: переделываю MSFF2 на железную механику + подшипники (спасибо ironman) так как мне теперь нравится всё кроме его МЗ хочу с датчиков параллельно контроллеру MS ещё и Мджо8. В Иле оси с Мджоя, обратка с FF2.
Теперь о проблеме:
подключаю датчик к Мджою в виндовском калибраторе, DXTweak2, Foxyv4 Analyser ход ручки полный, угол у датчика нет (резюки под педальный ход подбирались как выяснилось), то есть ручка упёрлась, а если дальше покрутить магнит, отсчёты продолжатся.
подключаю датчик к MS в виндовском калибраторе, DXTweak2, Foxyv4 Analyser проходят все значения от0 до 1023 а ход ручки ещё есть?
тоесть прямо противоположно ситуации с Мджоем
Разьясните как мне состыковать эти два контроллера. Скрены прилагаю.
MJoy хочет полный размах с датчика, от 0 до 5 V, чего вероятно нет (похоже на 0,8 - 4,2V)
MS похоже достаточно размаха 1-4V для полного диапазона - вот и разница вылазит
Тут либо более сильный магнит, либо холл более чувствительный поискать, либо уменьшать зазор между холлом и магнитом(если таковой имеет место быть)
Как совсем крайний вариант - усилитель rail-to-rail с небольшим коэффициентом
Не совсем понятно правда как ил сможет получать данные с одного джоя, а обратку отсылать на другой...


Х52(х45, Ева, MSSWFF2), долой МЗ
в Мастерская
Опубликовано
так у производителя свои резоны - массовость и надёжность. Ежели юзерам позволить крутить коэффииенты петлевого усиления, демпфирования и проч -
99% девайов станут неработосособны
Вообщем выход один - писать свой джой с FF ...